Quadrocopters, also known and quadrotors, are one of the most interesting little flying machines ever imagined; yet there's a load of disperse and almost undecipherable amount of information that comes from hobbyists' and builder's gut feeling on what seems to be the right thing to do.
This is my attempt at bringing all that information together in a simple to understand version for beginners to get designing their own quadrotors.
How they work
 |
| Quadrotor diagram showing forces and torques |
The concept is a flying machine with four motors aligned in a square; two on opposite sides of the square rotate in one direction and the other two rotate in the opposite direction.
This four rotor helicopter gives us some interesting properties:
1.- each motor lifts only a quarter of the weight of the heli, so we can potentially use less powerful motors
2.- the rotation or torque of the first pair of motors is canceled by the rotation of the second pair that goes in the opposite direction. Let me explain how this works:
On a regular helicopter, you have one big rotor to provide the lifting power and a little tail rotor; this one counteracts the rotation that the main big rotor would otherwise pass on to the structure of the helicopter (making it rotate almost as fast as the propeller)
On a quadrotor, if all motors turned on the same direction the thing would rotate same as a regular heli without tail rotor; the clever thing is that since one pair create a torque or rotation on one direction, the motors turning on the opposite direction create a torque also but on the opposite direction. These torques tend to cancel out and the quadrocopter stays facing the same direction without any rolling around.
 |
| Quadrotor control; arrow thickness denotes power |
3.- control becomes a matter of which motor gets more power and which one gets less.
Yaw (where the thing is "facing"; using your head, yaw is when turning left and right) is controlled by turning up the speed of the regular rotating motors and taking away power from the counter rotating; by taking away the same amount that you put in on the regular rotors produces no extra lift (it won't go higher) but since the counter torque is now less, the quadrotor rotates as explained earlier.
Roll (how tilted to the side it is while still facing the same direction; using your head, roll is turning it so that your chin is parallel to the ground) is controlled by increasing speed on one motor and lowering on the opposite one.
Pitch (how tilted it is; using your head is moving it up and down, similar to nodding) is controlled the same way as roll, but using the second set of motors. This may be kinda confusing, but roll and pitch are determined from where the "front" of the thing is, and in a quadrotor they are basically interchangeable; but do take note that you have to decide which way is front and be consistent or your control may go out of control.
These three can be controlled at the same time to give all the range of motion you could ever need from a flying thing
Now, building and flying a quadrotor from a remote control is simple and fun and stuff, but people noting the inherently stable flight (in theory with equal speed of the motors the thing keeps itself level) and ease of control (only three functions and they are all basically take speed from one and put in the other), people love to make them autonomous (flies itself) and semi-autonomous (at least keeps itself level by responding to disturbances and error).
Common sensors (Gyro, Accelerometer, Sonar/Rangefinder)
A gyroscope is a device that tells you the difference in angle from a reference one: this is useful in keeping the quadrocopter level so it won't fall or go sideways when we don't want it to.
 |
| Micro ElectroMechanic Mechanism (MEMS) gyroscope as found in Integrated Circuit (IC) sensors |
The accelerometer tells us which way the quadrotor is accelerating. This is useful because we can get an idea of how much the thing has moved by looking at acceleration over time (position is mathematically represented as the double integral of acceleration) so that we can move it back and keep it hovering on a steady position.
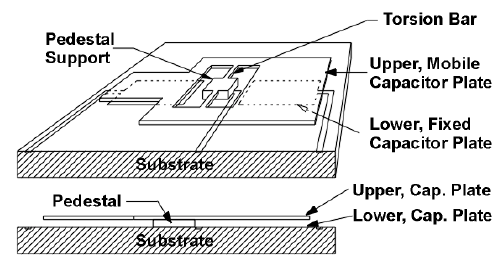 |
| MEMS Accelerometer based on capacitive effects |
A sonar is used to determine the distance from the sensor to an object. This helps in object detection an avoidance and is mostly used in fully autonomous quadcopters.
 |
| Ultrasonic Sonar sensor |
All these sensors are connected to a microcontroller or other control circuitry to make the decision as to how to control the motors (and therefore the quadrotor itself) according to plan.
Depending on how autonomous you want it to be, one or more of these sensors are used in combination; sometimes more sensors are used or more processing is done on the signals to get more information about the environment: creating maps, computer vision and navigation systems.
The flight mechanics of the quadrocopter, as explained in the how it works section, are not that difficult, but a "design" limitation is the choosing of motor/propeller.
Choosing a motor/propeller combo (prop size and RPM: lift vs torque)
There's something about aerodynamics that is just way too complex for beginners to get a working understanding of in a few words, all the fluxes and stuff makes it hard enough that even designers of commercial propellers bunch a lot of things into "constants" or "factors" that they arrive at experimentally.
But generally, the importan stuff depends largely on two things: the effective area of the propeller and RPM (revolutions per minute).
Revolutions per minute are largely dependent on the motor, in fact, it is one of the parameters used in their marketing; usually expressed as Kv, RPM per volt applied.
The propeller is marketed in terms of diameter x "pitch". the higher diameter means higher area; higher pitch also means higher effective area because more of the propeller is pushing air to create lift.
| Various propeller sizes and pitches |
In choosing a motor/propeller combination, you have to figure out what you actually need or want out of the quadrotor:
A higher RPM of the propeller will give you more speed and maneuverability, but it is limited in the amount of weight it will be able to lift for any given power. Also, the power drawn (and torque required) by the motor increases as the effective area of the propeller increases, so a bigger diameter or higher pitch one will draw more power at the same RPM, but will also produce much more lift (meaning it will be able to actually lift more weight). [Torque is like the rotating power of the motor]
A slower rotating propeller is used when you have a motor that manages less revolutions but can provide more torque. In this case using a longer or higher pitched propeller (which uses more torque to move more air in order to create lift) will give you a similar lift to a higher rotating one of less length/pitch.
The choice depends on both motor availability and weight requirements.
Motor technologies: Brushed vs brushless motors
There's a debate regarding the use of brushed or brushed motor. First, a brief explanation of both:
 |
| Brushed motor |
A brushed motor is your regular $1 toy car motor. They are called brushed because of the way the motor works: the direction of current in the rotating part (rotor) is changed using a mechanical switching mechanism, a pair of moving contacts called brushes disconnect from one side and connect to the other with every half rotation. This is done so the electric current keeps the rotor energized in such a way so as to keep being attracted to the permanent magnets, thus keeping it rolling.
 |
| Brushless motor inside view |
A brushless motor is one where the commutation mechanism is outside the motor itself, most often electronic. The thing with brushless motors is that there are no moving parts in the electrical path of current, so it generates less electromagnetic noise as there are no sparks (which happens in brushed motors when the brushes disconnect and connect on the other side).
The debate goes about how brushless motors, with its fewer moving or parts, requires less maintenance and has higher performance for size and that brushed motors are "old", obsolete technology.
For the most part, the actual gains in performance come from the thermal characteristics of the motor: given the same power, a brushless motor will probably be smaller due to the fact that the heat dissipates through the mounting (remember, the windings are stationary and attached to the motor frame), a bigger motor. This means that for the same size motor, you can push much more current through a brushless to get more power.
Now here comes the big "but": since they have been around the longest, brushed motors have become very cheap to manufacture, which means prices are very low. Also, since the commutation in brushless motors is external, there's an added cost of buying and/or building the Electronic Speed Controller (ESC), which could cost as much or even more than the motor itself (which even on the lower range are more expensive than brushed motors), also with the increased complexity that comes with more components to deal with.
Brushed motors use a relatively simple speed control technique known as Pulse Width Modulation (PWM) that controls the effective power that the motor gets by quickly switching the power on and off.
So as you can see, there's a lot to dig into when working in quadrocopters. Next up, assembling our own quadrotor and the whole design process.